transform from linear velocity to skid steer This paper described a method for the localization of a skid-steer vehicle by using . Mini Digger Self Hire & Driver Hire Services Wickford. When you’re carrying out extensive work in your garden or doing any other project that’s going to mean you have to shift substantial amounts of soil, a mini digger from Neil Sullivan & Sons will make short work of it.
0 · Visual
1 · Modeling and control of a 4
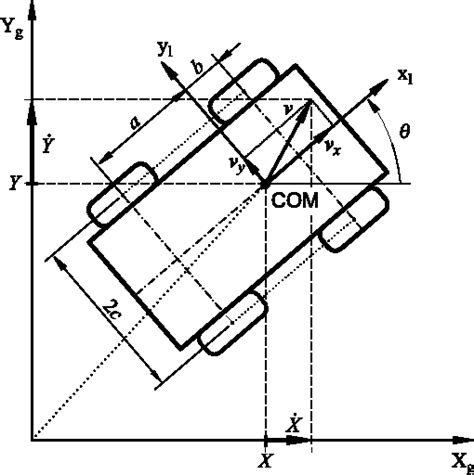
2 · Kinematics
3 · Drive Kinematics: Skid Steer & Mecanum (ROS Twist included)
4 · A simplified trajectory tracking control based on linear design for
5 · (PDF) Linear and Non
Mini Digger Hire Equipment. A mini digger can be slightly cheaper than a normal option in many cases, providing a smaller and more compact option that still offers the same benefits as a normal digger. We have a full range of mini digger hire options available to our clients. Our hire services in Dartford require no account on our site.
Visual
rate per hour for a skid steer operator
Skid Steer / Differential Drive. Here is some math for 2 and 4 wheel differential . This paper presents the design and analysis of an analytical strategy for . This paper described a method for the localization of a skid-steer vehicle by using .A detailed approach for a linear Proportional-Integral-Derivative (PID) controller and a non-linear controller-Linear Quadratic Regulator (LQR) is discussed in .
a skid-steering robot equipped with a camera, an IMU, and wheel encoders. For simplicity, .
• achievable linear and angular velocities of the robot are relatively small, • wheel contacts with surface at geometrical point (tire deformation is neglected), • vertical forces acting on wheels are statically dependent on weight of the ve- Skid Steer / Differential Drive. Here is some math for 2 and 4 wheel differential drive vehicles, 2 wheels and a castor, or skid steer tracked vehicles. Arc based commands. The basic skid steer equations are: velocity_right = w(RADIUS_OF_ARC_TO_DRIVE + WHEEL_BASE/2) velocity_left = w(RADIUS_OF_ARC_TO_DRIVE – WHEEL_BASE/2) This paper presents the design and analysis of an analytical strategy for trajectory tracking control of Skid-Steer wheeled UGV. A transformed model is defined from a virtual orientation angle such that scalar linear models are used for control design. This paper described a method for the localization of a skid-steer vehicle by using encoders and IMU sensors to define an equivalent track, instead of a fixed geometric track that can dynamically change depending on the interaction between the wheels and the terrain surface.
A detailed approach for a linear Proportional-Integral-Derivative (PID) controller and a non-linear controller-Linear Quadratic Regulator (LQR) is discussed in this paper. By analyzing several mathematical designs for the Skid Steer Mobile Robot
a skid-steering robot equipped with a camera, an IMU, and wheel encoders. For simplicity, although not necessary, we assume known extrinsic transformations between sensors. To allow smooth and accurate motion at higher speeds, an additional linear velocity control scheme is proposed, which takes actuator saturation, path following error, and reachable curvatures into account. A novel waypoint navigation controller for a skid-steer vehicle is presented, where the controller is a multiple input-multiple output nonlinear angular velocity and linear speed controller. Hierarchical Rule-Base Reduction (HRBR) was used in defining the controller. This entailed selecting inputs/outputs, determining the most globally influential inputs, generating a .
Modeling and control of a 4
Skid-steering platforms are no exception to this and although linear motions can be very well modeled, skid-based rotations depend on a number of factors, including the type of terrain and the location of the center of mass of the platforms, which are disregarded in .a skid-steer vehicle by using encoders to define an equivalent track, in place of a fixed geometric track that can dynamically change depending on the interaction between the wheels and the terrain surface.• achievable linear and angular velocities of the robot are relatively small, • wheel contacts with surface at geometrical point (tire deformation is neglected), • vertical forces acting on wheels are statically dependent on weight of the ve- Skid Steer / Differential Drive. Here is some math for 2 and 4 wheel differential drive vehicles, 2 wheels and a castor, or skid steer tracked vehicles. Arc based commands. The basic skid steer equations are: velocity_right = w(RADIUS_OF_ARC_TO_DRIVE + WHEEL_BASE/2) velocity_left = w(RADIUS_OF_ARC_TO_DRIVE – WHEEL_BASE/2)
This paper presents the design and analysis of an analytical strategy for trajectory tracking control of Skid-Steer wheeled UGV. A transformed model is defined from a virtual orientation angle such that scalar linear models are used for control design.
This paper described a method for the localization of a skid-steer vehicle by using encoders and IMU sensors to define an equivalent track, instead of a fixed geometric track that can dynamically change depending on the interaction between the wheels and the terrain surface.A detailed approach for a linear Proportional-Integral-Derivative (PID) controller and a non-linear controller-Linear Quadratic Regulator (LQR) is discussed in this paper. By analyzing several mathematical designs for the Skid Steer Mobile Robot
a skid-steering robot equipped with a camera, an IMU, and wheel encoders. For simplicity, although not necessary, we assume known extrinsic transformations between sensors. To allow smooth and accurate motion at higher speeds, an additional linear velocity control scheme is proposed, which takes actuator saturation, path following error, and reachable curvatures into account. A novel waypoint navigation controller for a skid-steer vehicle is presented, where the controller is a multiple input-multiple output nonlinear angular velocity and linear speed controller. Hierarchical Rule-Base Reduction (HRBR) was used in defining the controller. This entailed selecting inputs/outputs, determining the most globally influential inputs, generating a .Skid-steering platforms are no exception to this and although linear motions can be very well modeled, skid-based rotations depend on a number of factors, including the type of terrain and the location of the center of mass of the platforms, which are disregarded in .

Looking for an affordable mini digger rental in Colchester? Choose from our wide array of mini diggers, including the 0.8 Tonne Micro Digger , Kubota 5 tonne , and JCB 131x series 13 , all available at competitive prices.
transform from linear velocity to skid steer|(PDF) Linear and Non